
Een team van xx studenten en onderzoekers van de TU Delft heeft vandaag te horen gekregen dat hun robot het eerste Nederlandse voorwerp op de maan zal zijn. Hiermee zal Nederland na xx, xx,xx en xx het xxste land zijn dat een robot op de maan zet. De maanrover, Lunar Zebro genaamd, mag definitief mee op de GSLV Mk II raket die gelanceerd zal worden door ISRO (Indian Space Research Organisation). Door gebruik te maken van een specifiek loopconcept is de maanrover relatief klein, licht en goedkoop wat een groot voordeel is in de ruimtevaart.
Loopconcept
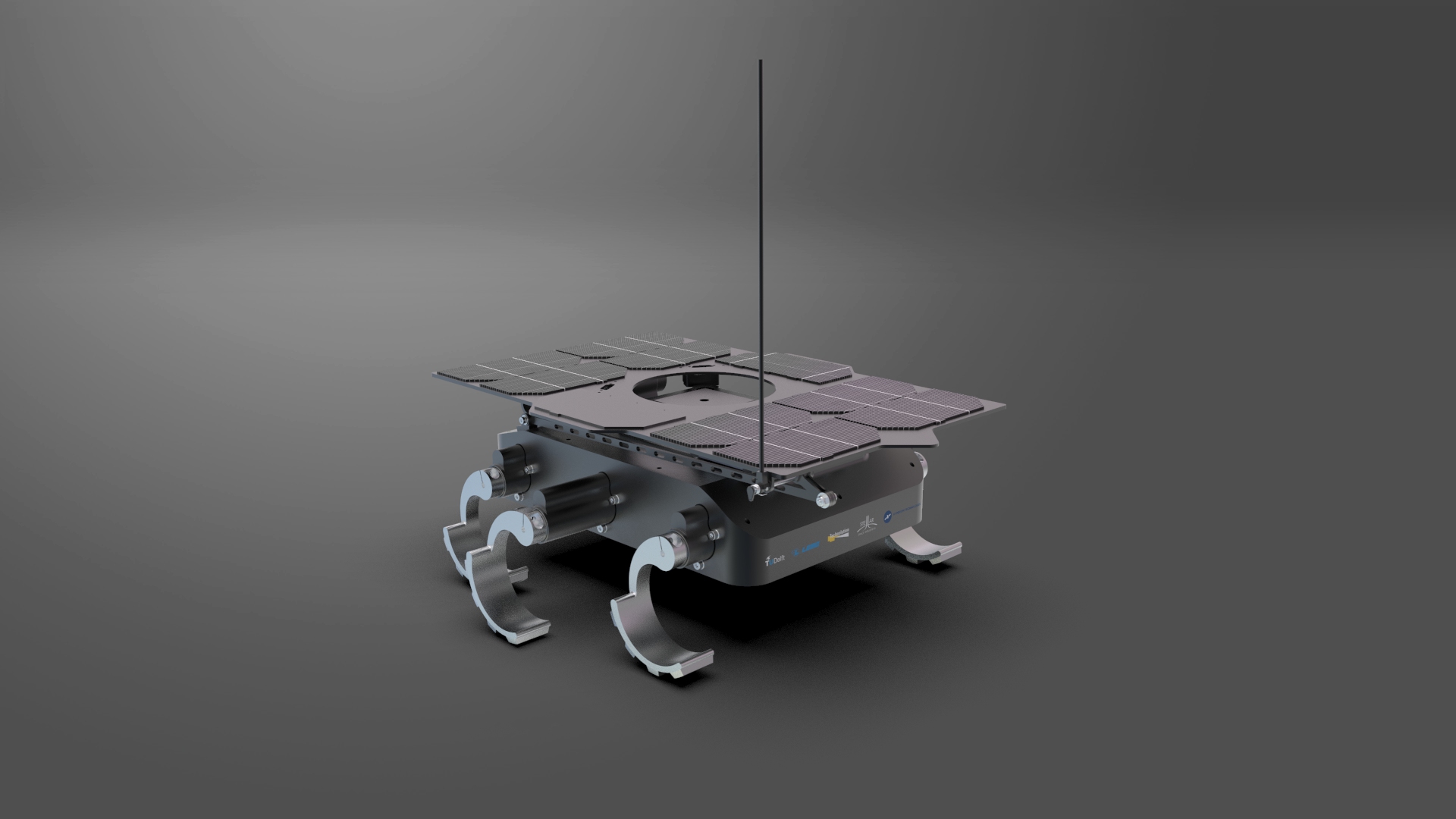
De Lunar Zebro maakt gebruik van 6 half cirkelvormige poten die allemaal individueel aangestuurd kunnen worden. Hierdoor kan de maanrover op relatief moeilijk berijdbaar terrein en in lage zwaartekracht omgeving zichzelf goed voortbewegen. “Dit loopconcept is al toegepast op robotjes hier op aarde, maar zoiets is nog nooit gedaan in de ruimte”, zegt universitair hoofddocent Chris Verhoeven, de geestelijk vader van de Zebro zoals deze robotjes heten. “Dit betekent dat er in het ontwerp en bouw van de Lunar Zebro wel wat dingen aangepast moesten worden om het geschikt te maken voor in de ruimte”.
Communicatie
Een van de moeilijkste dingen die ontworpen moest worden was de communicatie van de rover met een controle room op aarde. Hiervoor bood uiteindelijk de radiotelescoop in Dwingeloo uitkomst. Via deze radiotelescoop zal het team contact leggen met de rover op de maan en deze ook doorgeven wat voor stappen de rover moet zetten in welke richting. Ook krijgt het team alle belangrijke data en foto’s van de rover door. Wanneer de rover te horen heeft gekregen welke richting hij op moet lopen kan de rover zelf autonoom dit lopen en obstakels ontwijken met een ingebouwde camera. XX OVER CAMERA: “Dit is de kleinste camera die op dit moment gebouwd is”.
ISRO
QUOTE MANEESH OVER HOE CONTACT MET ISRO IS GEKOMEN EN HOE HET DAARNA IS VERLOPEN. ISRO zal de rover meenemen met hun Chandrayaan-2 missie. Deze missie zal een raket lanceren in het Zuidoosten van India. Deze raket zal dan 18 dagen erover doen om de lander de oppervlakte van de maan te laten bereiken. In deze lander die lijkt op een vierkante box op pootjes zal een lander van ISRO zelf zitten. Deze lander zal door middel van een uitgeklapte helling de oppervlakte van de maan bereiken. Aan de onderkant van deze helling zal dan de Delftse maanrover zitten die uiteindelijk losgelaten zal worden en, aangezien er minder zwaartekracht op de maan is, met een zachte val de maanoppervlakte bereiken.
Meerdere zebro’s op de maan
Doordat via het loopconcept de robotjes klein, licht en goedkoop uitgevoerd kunnen worden is het ultieme doel van het studententeam om meerdere van dit soort robots met verschillende raketten op de maan te krijgen. Deze robotjes zouden dan met elkaar contact hebben en zodoende samen kunnen werken om de maan nog beter te kunnen verkennen. XX “QUOTE OVER WAAROM DAT BELANGRJK IS”. Deze eerste Lunar Zebro is dan ook een testcase om te kijken of het allemaal werkt. “Hopelijk zal de Lunar Zebro zonder defect aankomen op de maan en ook werken zoals we het hebben bedacht”, aldus XX.
Maanbevingen
De Lunar Zebro zal echter meer zijn dan alleen een testcase. Doordat de 6 cirkelvormige poten zich ook helemaal naar boven toe kunnen roteren, kan de hele body van de Lunar Zebro de oppervlakte van de maan aanraken en zodoende onderzoek doen naar maanbevingen, aardbevingen op de maan. Deze komen vrij vaak voor, maar er is nog vrij weinig over bekend. Met deze maanrover hoopt het team meer te weten te komen over dit verschijnsel.